|
|
提问
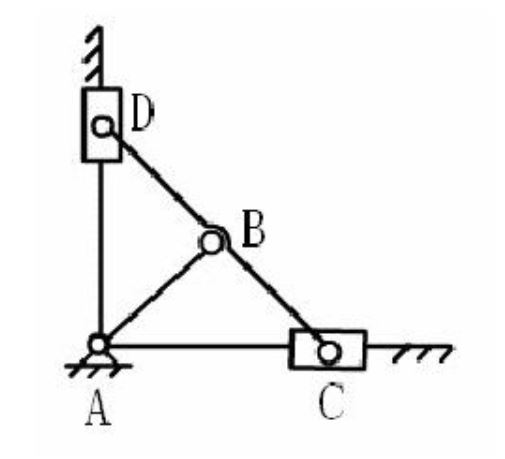
这个机构几个自由度?
豆包大模型2.0的回答
要计算该平面机构的自由度,我们使用平面机构自由度计算公式:
F=3n−2PL−PH
其中:n为活动构件数PL为低副数(转动副 + 移动副)PH为高副数(如齿轮、凸轮副等,本题无高副,故PH=0)
1. 确定活动构件数n
逐一分析图中构件:
机架(A 处固定铰、竖直导轨、水平导轨):固定,不计入活动构件。
活动构件:AB 杆、DB 杆、BC 杆、D 滑块、C 滑块,共 5 个,即n=5。
2. 确定低副数PL低副包括转动副和移动副:
转动副:
A 处:AB 杆与机架的转动副(1 个)
D 处:DB 杆与 D 滑块的转动副(1 个)
B 处:三个构件(AB、DB、BC)汇交,为复合铰链,转动副数 =
3−1=2个
C 处:BC 杆与 C 滑块的转动副(1 个)
转动副总数:
1+1+2+1=5个
移动副:
D 滑块与竖直导轨的移动副(1 个)
C 滑块与水平导轨的移动副(1 个)
移动副总数:2个
低副总数:PL=5+2=7
3. 计算自由度F代入公式:F=3n−2PL−PH
=3×5−2×7−0
=15−14
=1
结果正确,但分析错误,大模型很多时候是先有结果,然后编思考过程好像是那么回事似的。
为什么说是分析错误,因为DBC是一个连杆,怎么可能当成两个连杆。
事实上AB杆是虚约束,所以应该去掉,这样活动构件只有三个,而低副有4个,就是D处、C处的转动副2个,移动副2个。
这样就是3*3-4*2=1
文心5.0大模型的回答与豆包大模型完全一样,一个是硬把DC杆给拆成两个,另一个是根本没发现AB杆是虚约束。
智谱5.0大模型的回答
要计算平面机构的自由度,需使用公式
F=3n−2PL−PH
n 为活动构件数(机架不计入);
PL为低副数(转动副+移动副);PH为高副数(本题无高副)
步骤1:确定活动构件数n图中机架为A,活动构件包括滑块D、滑块C、以及连接铰链B 的杆(共3个活动构件),故
n=3。
步骤2:确定低副数PL移动副:滑块D 与竖直导轨(机架)的移动副、滑块
C 与水平导轨(机架)的移动副,共2 个。
转动副:机架A 与杆的转动副、铰链B 处的转动副(连接杆与滑块的转动副),共2 个。
F=3×3−2×4−0=9−8=1
最终,该机构的自由度为 1。
同样是结果正确,分析全错。
活动构件数量就错了,连接杆DC硬是没看到,所以确定低副时自然也没有连杆DC分别与滑块C和D的两个转动副 。
千问大模型Qwen3.5-Plus的回答
这个机构的自由度可以通过 Kutzbach 准则 来计算。Kutzbach 准则的公式为:
F=3(n−1)−2pL−pH
其中:F 是机构的自由度。n 是机构中构件的数量(包括机架)。pL
是低副(转动副和平移副)的数量。pH是高副(如齿轮副、凸轮副)的数量。
1. 确定构件数量n
观察图片,我们可以看到以下构件:
构件 A(机架)
构件 B(连杆)
构件 C(机架)
构件 D(连杆)
因此,构件数量n=4 。
2. 确定低副数量pL,低副包括转动副和平移副。我们来数一下:
A 和 B 之间的转动副
B 和 C 之间的转动副
B 和 D 之间的转动副
D 和机架(假设为 A)之间的转动副
因此,低副数量pL=4 。
3. 确定高副数量pH图片中没有高副,因此pH=0 。
4. 计算自由度F=3(4−1)−2×4−0=1
也是一样的,结果正确,但分析错误。
千问大模型第一步就算错了,因为这个自由度公式下n是总构件数,而千问大模型Qwen3.5-Plus把两个滑块当成机架,从而没“看到”真正的机架。
正确的总构件数量应该是机架、滑块 D、滑块 C、DC 杆、AB 杆,所以总构件是5而不是4。
这么计算下来自由度就是零了,但此机构确实有1个自由度,所以大模型为了硬凑结果就修改数值。
Gemini3的回答
To determine the degrees of freedom (DOF) of this mechanism, we use the **Kutzbach Criterion** for planar mechanisms.
### 1. Identify the Links ()
First, we count the number of rigid bodies (links) in the system, including the fixed frame:
1. **Link 0:** The ground/frame (includes the vertical guide, horizontal guide, and pivot A).
2. **Link 1:** Slider D.
3. **Link 2:** Slider C.
4. **Link 3:** The rod connecting D and C (Link DC).
5. **Link 4:** The rod connecting A and B (Link AB).
* **Total Links () = 5**
### 2. Identify the Joints ()
Next, we count the number of joints and their types. All joints here are "lower pairs" (1 DOF each):
* **Prismatic Joints (P):** 2 (Slider D in the vertical guide and Slider C in the horizontal guide).
* **Revolute Joints (R):** 4 (Pivot at A, pivot at D, pivot at C, and the connection at B).
* **Total Joints () = 6**
### 3. Calculate using Kutzbach's Equation
The formula for a planar mechanism is:
Plugging in our numbers:
### 4. The "Redundant Constraint" Exception
While the formula results in 0 (which usually indicates a static structure), this specific mechanism is a classic example of a **redundant constraint**.
In this geometry, point **B** is the midpoint of the rod **DC**. In an "Elliptical Trammel" (the sliders D and C moving in perpendicular slots), the midpoint of the connecting rod naturally traces a perfect circle centered at the origin (**A**).
Because Link **AB** is also constrained to move in a circle centered at **A**, it does not actually restrict the motion of the mechanism; it simply follows the path the mechanism was already going to take. This is called a **passive or redundant constraint**.
### Final Answer
Because one constraint is redundant, we add 1 back to our calculated value:
**The mechanism has 1 Degree of Freedom.**
确定机构自由度公式确实有两个,一个公式的n是活动构件,另一个公式中的n是总构件数。
而国产大模型犯错之一就是识图能力不行,需要识别活动构件数时,把一个连杆当成两个连杆。
需要识别总构件数时,把两个滑块当成机架,从而没“看到”真正的机架。
但不管使用哪个公式,在此题中都必须发现AB杆是虚约束。
而国产大模型犯错之二就是无法识别出AB杆是虚约束,而Gemini3则通过“判断”出整体机构是个连杆椭圆仪机构简图,从而能说出AB杆是虚约束。
可见Gemini3也不是真能“思考”出AB杆是虚约束,是其强大的语料库有这个资料。
而国产大模型们呢,是肚里没货判断错误,还是肚里有货说不出来呢。
|
|
 |小黑屋|手机版|Archiver|机械荟萃山庄
( 辽ICP备16011317号-1 )
|小黑屋|手机版|Archiver|机械荟萃山庄
( 辽ICP备16011317号-1 )



 发表于 2026-2-21 10:09:13
发表于 2026-2-21 10:09:13